
- Détails
- Écrit par Christophe
- Catégorie : Recherche
- Affichages : 8407

PROCEDE ET DISPOSITIF DE COLORATION DES CHEVEUX
N° d'enregistrement : EP13711449
Date de dépôt : 11/01/2013
Inventeurs : BLANC CHRISTOPHE
Demandeurs : WISIMAGE
PROCEDE DE TRAITEMENT D'IMAGE POUR CORRIGER UNE IMAGE CIBLE EN FONCTION D'UNE IMAGE DE REFERENCE ET DISPOSITIF DE TRAITEMENT D'IMAGE CORRESPONDANT
N° d'enregistrement : 10/01916
Date de dépôt : 04/05/2010
Inventeurs : ROBIN JEAN MARC; BLANC CHRISTOPHE; CHAUSSAT BENOIT
Demandeurs : VESALIS
PROCEDE DE TRAITEMENT D'IMAGE POUR APPLICATION D'UNE COULEUR
N° d'enregistrement : 10/01915
Date de dépôt : 04/05/2010
Inventeurs : ROBIN JEAN MARC; BLANC CHRISTOPHE; CHAUSSAT BENOIT
Demandeurs : VESALIS
- Détails
- Écrit par Christophe
- Catégorie : Recherche
- Affichages : 12867
2012
Schwab, S., Chateau, T., Blanc, C. and Trassoudaine, L. (2012), "Suivi de visages par regroupement de détections : traitement séquentiel par blocs", RFIA : 18e congrès francophone AFRIF-AFIA Reconnaissance des Formes et Intelligence Artificielle.
2011
Bouges, P., Chateau, T., Blanc, C. and Loosli, G., "Détection de visage dans une pose diff'erente de celle apprise", 13e colloque GRETSI. septembre 2011.
Schwab, S., Chateau, T., Blanc, C. and Trassoudaine, L., "Clustering de visages : vers la construction automatique d'un album photo à partir d'une séquence vidéo", ORASIS - Congres francophone des jeunes chercheurs en vision par ordinateur. juin 2011
2010
S. GIDEL, P. CHECCHIN, C. BLANC, T. CHATEAU,, L. TRASSOUDAINE, "Pedestrian detection and tracking in an urban environment using a multilayer laser scanner", in IEEE Transactions on Intelligent Transportation Systems, vol. 11, num. 3, ISSN 1524-9050, september 2010.
S. GIDEL, C. BLANC, T. CHATEAU, P. CHECCHIN, L. TRASSOUDAINE, "Comparison between GMM and KDE data fusion methods for particle filtering: application to pedestrian detection from laser and video measurements", in 13th IEEE International Conference on Information Fusion, Edinburgh, UK, July 2010.
C. BLANC. “Biorafale”. in RFIA2010 1st workshop VISAGES (Vidéo-surveillance Intelligente : Systèmes et AlGorithmES). Caen, France, janvier 2010.
2009
F. GÉROSSIER, P. CHECCHIN, C. BLANC, R. CHAPUIS et L. TRASSOUDAINE. “Trajectory-oriented EKF-SLAM using the Fourier-Mellin Transform applied to Microwave Radar Images”. in IEEE/RSJ International Conference on Intelligent Robots and Sys-tems (IROS). St Louis, Missouri, USA 2009.
P. CHECCHIN, F. GEROSSIER, C. BLANC, R. CHAPUIS, L. TRASSOUDAINE, "Radar Scan Matching SLAM using the Fourier-Mellin Transform", in The 7th International Conference on Field and Service Robots, Cambridge, Massachusetts, USA, July 2009.
S. GIDEL, C. BLANC, T. CHATEAU, P. CHECCHIN, L. TRASSOUDAINE, "Non-Parametric Laser and Video Data Fusion: Application to Pedestrian Detection in Urban Environment", in 12th IEEE International Conference on Information Fusion, Seattle, USA, July 2009.
F. CHANIER, P. CHECCHIN, C. BLANC, L. TRASSOUDAINE, "Map Fusion based on a multi-map SLAM framework", An Edition of the Selected Papers from the IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems 2008, Series: Lecture Notes in Electrical Engineering , Vol. 35 ,Lee, Sukhan; Ko, Hanseok; Hahn, Hernsoo (Eds.) , 2009, I, p.439-454, Hardcover, ISBN: 978-3-540-89858-0
S. GIDEL, C. BLANC, T. CHATEAU, P. CHECCHIN, L. TRASSOUDAINE, "A Method based on Multilayer Laserscanner to Detect and Track People in Urban Environment", in IEEE Intelligent Vehicle Conference, Xi'an, Shaanxi, China, june 2009
C. BLANC, P. CHECCHIN, S. GIDEL, L. TRASSOUDAINE, " Data Fusion Performance Evaluation for Dissimilar Sensors: Application to Road Obstacle Tracking", in Sensor and Data Fusion, In-Tech, ISBN 978-3-902613-52-3, february 2009
2008
F. CHANIER, P. CHECCHIN, C. BLANC, L. TRASSOUDAINE, "SLAM Process using Polynomial Extended Kalman Filter: Experimental Assessment", in 10th IEEE International Conference on Control, Automation, Robotics and Vision (ICARCV), Hanoi, Vietnam, December 2008.
F. CHANIER, P. CHECCHIN, C. BLANC, L. TRASSOUDAINE, "Comparison of EKF and PEKF in a SLAM context", in 11th IEEE International Conference on Intelligent Transportation Systems, Beijing, China, October 2008.
S. GIDEL, P. CHECCHIN, C. BLANC, T. CHATEAU, L. TRASSOUDAINE, "Pedestrian Detection Method using a Multilayer Laserscanner. Application in Urban Environment", in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Nice, France, september 2008. pdf
F. CHANIER, P. CHECCHIN, C. BLANC, L. TRASSOUDAINE, "Map Fusion based on a multi-map SLAM framework", in IEEE Conference on Multi Fusion and Integration for Intelligent Systems (MFI), Seoul, Korea, August 2008.
F. CHANIER, P. CHECCHIN, C. BLANC, L. TRASSOUDAINE, "Polynomial Extended Kalman Filter in a SLAM framework", in IEEE IROS08 2nd Workshop on Planning, Perception and Navigation for Intelligent Vehicles, Nice, France, september 2008.
S. GIDEL, P. CHECCHIN, C. BLANC, T. CHATEAU, L. TRASSOUDAINE, "Decentralized Fusion of a 4-layer laser sensor based on Parzen Method : Application to Pedestrian Detection", ICRA 2008 Workshop : Human Detection from Mobile Robot Platforms : Different Perspective, Different Modalities, Pasadena, USA, june 2008. pdf
S. GIDEL, P. CHECCHIN, C. BLANC, T. CHATEAU and L. TRASSOUDAINE. "Pedestrian Detection using a Multilayer Laserscanner", in 16th congrés francophone AFRIF-RFIA, Amiens, France, january 2008. pdf
2007
C. BLANC, P. CHECCHIN, S. GIDEL and L. TRASSOUDAINE. "Data Fusion Performance Evaluation for Range Measurements Combine with Cartesian ones for Road Obstacle Tracking", in IEEE International Conference on Vehicular Electronics and Safety, Beijing, China, december 2007. pdf
F. CHANIER, P. CHECCHIN, C. BLANC, L. TRASSOUDAINE. "Impact of Perturbation Estimator on EKF-SLAM results", in 6th IEEE Symposium on Intelligent Autonomous Vehicles, Toulouse, France, september 2007.
2005
C. BLANC, L. TRASSOUDAINE, J. GALLICE."EKF and particle filter track-to-track fusion: a quantitative comparison from radar/lidar obstacle tracks", in IEEE International Conference on Information Fusion, Philadelphia, USA, july 2005.pdf
N. TRUJILLO, R. CHAPUIS, F. CHAUSSE, C. BLANC. "On road simultaneous vehicle recognition and localization by model based focused vision", in IAPR Conference on Machine Vision Applications, Tokyo, Japan, may 2005.
2004
C. BLANC, R. AUFRERE, L. MALATERRE, J. GALLICE, J. ALIZON. "Obstacle detection and tracking by millimeter wave radar", in IEEE Symposium on Intelligent Autonomous Vehicles (IAV), Lisboa, Portugal, july 2004.pdf
C. BLANC, L. TRASSOUDAINE, Y. LE GUILLOUX, R. MOREIRA."Track to track fusion method applied to road obstacle detection", in IEEE International Conference on Information Fusion, Stockholm, Sweden, june/july 2004.pdf
C. BLANC. "Fusion de pistages pour la perception à bord des véhicules routiers intelligents", Journée STIC (Sciences et Technologies de l'Information et de la Communication), Université Blaise Pascal, Clermont-Ferrand, France, juin 2004.
Y. LE GUILLOUX, J. LONNOY, R. MOREIRA, C. BLANC, L. TRASSOUDAINE, H. TATTEGRAIN, M.P. BRUYAS, A. CHAPON. "PAROTO Project: infrared and radar data fusion for obstacle avoidance", in 8th international forum on Advanced Microsystems for Automotive Application, Berlin, Germany, march 2004.
2003
- Détails
- Écrit par Christophe
- Catégorie : Recherche
- Affichages : 9211
Titre
Combinaison d'estimations : application à la détection d'obstacles à bord des véhicules routiers intelligents.
Manuscrit
Résumé
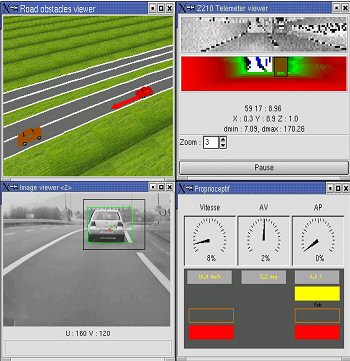
Ces activités de recherche s'intégrent à l'un des deux groupes de recherche du laboratoire LASMEA : GRAVIR (GRoupe Automatique VIsion et Robotique), dont l'objectif est "de développer des concepts théoriques et méthodologiques pour la perception de l'environnement de machines, et de valider ceux-ci expérimentalement sur des démonstrateurs par des systèmes dédiés". Cet objectif a été particulièrement suivi dans les véhicules routiers intelligents puisque, depuis près de quinze ans, les résultats de recherches sur les capteurs, la reconnaissance des formes et la fusion de données obtenues par une dizaine de chercheurs sont appliqués à ce domaine.
Ces recherches concernent la fusion de données pour la perception à bord des véhicules routiers intelligents. Elles s'inscrivent parmi deux projets : ARCOS (Action de Recherche pour une COnduite Sécurisée) s'inscrit dans le cadre des actions fédératives du PREDIT (Programme national de recherche et d'innovation dans les transports terrestres, à l'initiative des ministères chargés de la recherche, des transports, de l'environnement et de l'industrie, de l'Ademe et de l'Anvar) et PAROTO (Projet Anticollision Radar et Optronique pour l'auTOmobile) initié par le ministère de la recherche en partenariat avec SAGEM Division Défense et Sécurité, et l'INRETS (Institut National de REcherche sur les Transports et leur Sécurité). Dans ce cadre, je m'intéresse à un système de perception conduisant, et ceci dans une grande variété de situations, à la définition d'une carte de l'environnement à l'avant du véhicule intelligent : chaque obstacle y est décrit par sa position absolue, son état cinématique et un certain nombre de caractéristiques qui peuvent être déterminantes pour définir l'aide à apporter au conducteur. Cette perception s'appuie sur le dévelopement d'un système de fusion de données appliqué à la détection et au suivi des obstacles. Plusieurs capteurs, dont les complémentarités et redondances ont été soulignées, ont ainsi été installés à l'avant de notre véhicule démonstrateur : VELAC (VEhicule du Lasmea pour l’Aide à la Conduite); un capteur RADAR (développé au sein de notre laboratoire) dont l'objectif prioritaire est de fournir une information de vitesse relative des obstacles, un capteur LIDAR (Riegl) permettant une représentation 3D de la scène routière, un capteur thermique (SAGEM) dont l'objectif était de détecter et de suivre les différents obstacles quelques soient les conditions atmosphériques. Les données de ces différents capteurs sont traitées indépendamment afin de détecter, et de suivre les obstacles à l'avant du véhicule. La problématique de fusion est ainsi vue comme une combinaison de pistages (estimations à l'aide de filtre de Kalman ou à particules). Il devient donc possible, après cette fusion, de représenter une carte précise de l'environnement à l'avant du véhicule intelligent : chaque obstacle y est décrit par sa position absolue, et son état cinématique qui sont déterminants pour définir l'aide à apporter au conducteur. Des résultats ont été validés à bord de notre véhicule démonstrateur VELAC.